 Within the past decade, many advancements have been made in the 3-D market from printing to movies. Now scientists report in ACS’ Analytical Chemistry that by combining a robotic arm and mass spectrometry, they can analyze the surface of irregularly shaped 3-D objects, potentially opening up new branches of forensics and pharmaceutics.
Within the past decade, many advancements have been made in the 3-D market from printing to movies. Now scientists report in ACS’ Analytical Chemistry that by combining a robotic arm and mass spectrometry, they can analyze the surface of irregularly shaped 3-D objects, potentially opening up new branches of forensics and pharmaceutics.
Mass spectrometry (MS) is a tool that helps researchers identify the components of a sample. In recent years, the instrument has made its way outside the laboratory for use in forensics and drug screening. But current MS techniques can not examine large, bulky, curved objects without a lot of human intervention. Previously, Facundo M. Fernández and colleagues performed a proof-of concept study to show that a 3-D infrared camera could direct a robotic arm to collect samples for plasma ionization MS analysis, but only certain types of molecules could be studied with the method. In the current work, the team wanted to expand on this idea of direct surface sampling of irregularly shaped 3-D objects.
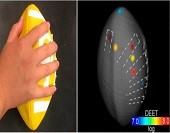
The researchers developed a new method called robotic surface analysis MS (RoSA-MS). To do this, they attached a custom-built laser scanner to a force-sensing robotic arm. The laser scanner created a digital map of the sample’s surface, which directed a spring-loaded sampling probe — also attached to the arm — to certain locations. The probe briefly contacted the surfaces of objects and collected trace amounts of the material. After collecting the sample, the arm placed the probe into an electrospray ionization mass spectrometer that can analyze a wide range of samples. The researchers note that the probe could be tailored for different applications. For example, they used RoSA-MS to detect caffeine on the surface of a plastic coffee cup and to pinpoint the locations of pesticide residue on a small football.
The authors acknowledge funding from the National Science Foundation and the National Science Foundation Center for Chemical Evolution.
For more interesting articles from ACS, visit here.
contributed by Maria de la Paz Carpio-Obeso